สถานีงานเดี่ยวเซลล์กระเป๋าอัตโนมัติความแม่นยำสูงเครื่องซ้อนอัตโนมัติ
1.1 ภาพรวมอุปกรณ์
tmax-ys-bzp200 เป็นเครื่องวางซ้อนอัตโนมัติที่มีความแม่นยำสูงพร้อมคุณสมบัติขั้นสูงมากมายเพื่อให้แน่ใจว่ามีความเสถียร, การวางซ้อนอิเล็กโทรดที่แม่นยำและทำซ้ำได้. ใน "Z" วิธีการวางซ้อนแบบแฟชั่น, แอโนดและแคโทด อิเล็กโทรดจะถูกวางซ้อนกับฟิล์มแยกระหว่าง.
วิดีโอการทำงาน: https://www.youtube.com/watch?vu003dvjtov4vkzfs
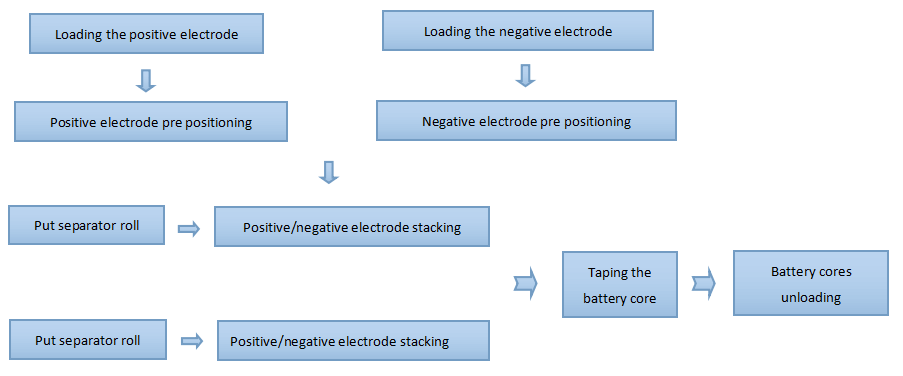
1.2 เวิร์กโฟลว์
ตัวคั่นใช้ความคิดริเริ่มในการคลี่คลายและถูกนำเข้าสู่โต๊ะวางซ้อนผ่านกลไกการตึง โต๊ะวางซ้อนขับเคลื่อนตัวคั่นเพื่อเลื่อนไปมาเพื่อวางอิเล็กโทรด อิเล็กโทรดบวกและลบจะถูกลบออกจากกล่องวัสดุสองกล่องด้านซ้ายด้วยถ้วยดูดสองชุดของตัวจัดการตามลำดับ , แล้ววางซ้อนกันบนโต๊ะซ้อนหลังจากวางตำแหน่งที่แม่นยำ หลังจากซ้อน , แกนแบตเตอรี่จะถูกโอนไปยังสถานีติดกาวม้วนหางโดยหุ่นยนต์, และม้วนหางเป็นไปโดยอัตโนมัติ ตัวคั่นถูกตัดออกและเคาะโดยอัตโนมัติ.
ผังกระบวนการมีดังนี้:
1.คุณสมบัติของอุปกรณ์ 3 อย่าง
1.3.1 ตัวคั่น: คลี่คลายที่ใช้งาน; การควบคุมความตึงการแก้ไขความเบี่ยงเบนของตัวคั่น การแยกไฟฟ้าสถิตกำจัด; ความแม่นยำในการจัดตำแหน่งตัวคั่น±0.5mm;
1.3.2 ความแม่นยำสูง: ด้วยการวางตำแหน่งที่แม่นยำของอิเล็กโทรด, ความแม่นยำโดยรวมของอิเล็กโทรดในการเรียงซ้อนจะอยู่ที่±0.3 มม.
1.3.3 ประสิทธิภาพสูง: ความเร็วในการซ้อนสามารถเข้าถึง 0.6s~1s/pcs;
1.3.4 การป้องกันฝุ่น: กล่องวัสดุและการจัดตำแหน่งล่วงหน้ามีกลไกป้องกันฝุ่นที่มีประสิทธิภาพ
ความน่าเชื่อถือ 1.3.5: โมดูลที่มีความแม่นยำสูงและการเคลื่อนไหวคงที่ของอุปกรณ์ได้รับการแก้ไขด้วยหมุดระบุตำแหน่ง
1.3.6 จำนวนการวางซ้อนอิเล็กโทรดที่แม่นยำ: ไม่มีการป้องกันการตรวจจับอิเล็กโทรด กลไกป้องกันชิ้นส่วนอิเล็กโทรดพิเศษ กลไกการตรวจจับอิเล็กโทรดพิเศษ, ช่วยป้องกันอิเล็กโทรดเสริมจากการซ้อนในแกนแบตเตอรี่ได้อย่างมีประสิทธิภาพ.
1.3.7 การตรวจจับแท็บอิเล็กโทรด: ตรวจจับอิเล็กโทรดที่มีแถบที่เสียหายและป้องกันไม่ให้ซ้อนเข้าไปในแกนแบตเตอรี่โดยไม่ได้ตั้งใจ.
1.3.8 สามารถยืนยันได้ตามความต้องการของลูกค้า, ตระหนักถึงสวิตช์ของกล่องวัสดุผ่านการจัดการของหุ่นยนต์, และร่วมมือกับสายการผลิตอัตโนมัติเพื่อโหลดและยกเลิกการโหลดโดยอัตโนมัติ กล่องใส่ของ.
1.3.9 สามารถยืนยันได้ตามความต้องการของลูกค้า, และแกนแบตเตอรี่แบบเรียงซ้อนสามารถขนถ่ายไปยังสายการประกอบถัดไปโดยอัตโนมัติ.
2.องค์ประกอบมาตรฐาน
|
ไม่.
|
ชื่อส่วนประกอบ
|
จำนวน/ ชุด
|
สังเกต
|
|
1
|
กลไกการป้อนอัตโนมัติของกล่องวัสดุ
|
2
|
กล่องวัสดุพิเศษชนิดปลั๊กอิน, สองชุดสำหรับขั้วบวกและขั้วลบ, ปรับขนาดได้;
|
|
2
|
กลไกเสริมการโหลดอิเล็กโทรด
|
2
|
กลไกการแปรงและเครื่องปั่น เครื่องเป่าลมและดูดฝุ่น ป้องกันปัญหาอิเล็กโทรดเสริม
|
|
3
|
กลไกการโหลดและดันอิเล็กโทรด
|
2
|
รับประกันว่าหุ่นยนต์จะดูดซับอิเล็กโทรดได้อย่างน่าเชื่อถือ สัญญาณเตือนการปิดอัตโนมัติในกรณีที่วัสดุขาดแคลน
|
|
4
|
กลไกการควบคุมความตึงตัวคั่น
|
1
|
ตัวคั่นที่ใช้งานคลี่คลาย, ความตึงเครียดคงที่
|
|
4.1
|
ระบบแก้ไขตัวคั่น
|
1
|
คลี่คลายและแก้ไขความเบี่ยงเบน
|
|
5
|
โมดูลกำหนดตำแหน่งล่วงหน้าทางกล
|
2
|
การวางตำแหน่งที่แม่นยำทางกล อุปกรณ์เก็บฝุ่น และติดตั้งกลไกดักฝุ่น
|
|
5.1
|
การตรวจจับหลายชิ้น
|
2
|
การตรวจจับความหนาของอัลตราโซนิกเพื่อป้องกันไม่ให้ชิ้นส่วนพิเศษเข้าสู่แกนแบตเตอรี่
|
|
6
|
จอมบงการ
|
2
|
เซอร์โวไดรฟ์ช่วยให้มั่นใจว่าผู้ควบคุมสามารถจับและวางอิเล็กโทรดได้อย่างน่าเชื่อถือ
|
|
7
|
กลไกการโหลดถ้วยดูด
|
4
|
ชนิดหัวดูดสูญญากาศสองชุดและชนิดแผ่นดูดสองชุด
|
|
8
|
โต๊ะซ้อน
|
1
|
การแปลและการยกตารางการซ้อนของไดรฟ์เซอร์โว: บอลสกรูที่แม่นยำเพื่อให้ทราบถึงการเคลื่อนที่ของลูกสูบของโต๊ะซ้อน
|
|
9
|
โมดูลหนีบหุ่นยนต์
|
1
|
หุ่นยนต์รับรู้การถ่ายโอนของแกนแบตเตอรี่โดยอัตโนมัติ
|
|
10
|
กลไกการตัดแยก
|
1
|
กลไกมีดร้อนหนึ่งชุด, ตัดออกหลังจากกำหนดความยาวคอยล์หาง
|
|
11
|
กลไกการติดเทปกาวด้านข้าง
|
1
|
สามารถกำหนดตำแหน่งและปริมาณของกาวที่ด้านข้างโดยรอบ (รวมทั้งตรงกลางของแถบ) ได้
|
|
12
|
กลไกการขนถ่ายอัตโนมัติ
|
1
|
การซ้อนและขนแกนแบตเตอรี่โดยอัตโนมัติ, การลบแบทช์, ลดความต้องการด้วยตนเอง
|
|
13
|
ระบบปฏิบัติการไฟฟ้า
|
1
|
การทำงานของหน้าจอสัมผัส, พร้อมปุ่มหยุดฉุกเฉิน, สวิตช์เปิดปิดและปุ่มอื่นๆ
|
|
14
|
ระบบควบคุม
|
1
|
ติดตั้งเครื่องใช้ไฟฟ้าและวงจรแก๊สภายในอุปกรณ์, ประหยัดพื้นที่และบำรุงรักษาง่าย
|
|
15
|
พื้นผิวชั้นวาง
|
2
|
สี: คอมพิวเตอร์สีเทา
|
|
16
|
ผ้าคลุมกันฝุ่น
|
1
|
ฝาครอบลูกแก้วอลูมิเนียมอัลลอยด์ 1 ชุด, พร้อมสวิตช์อินเตอร์ล็อคและสวิตช์ฉุกเฉิน
|
|
17
|
กลไกการดูดฝุ่น
|
1
|
การเก็บฝุ่นของโบลเวอร์ การวางตำแหน่งล่วงหน้า, กล่องวัสดุ
|
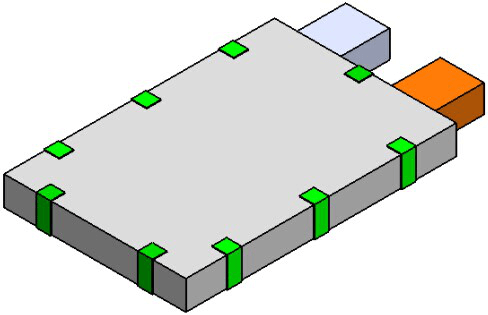
3 . ช่วงขนาดแบตเตอรี่ที่เหมาะสม (สามารถกำหนดเองได้)
|
รายการ
|
ข้อกำหนด (มม.)
|
|
ความยาวแกนแบตเตอรี่L
|
135-190
|
|
ความกว้างของแกนแบตเตอรี่W
|
80-150
|
|
ความหนาของแบตเตอรี่T
|
3.5-20
|
|
ความยาวของแท็บ
|
6-20
|
|
ร่างแกนแบตเตอรี่
|
|
|
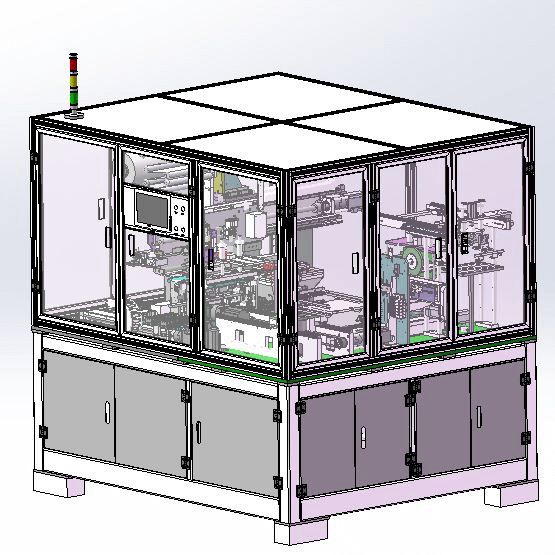
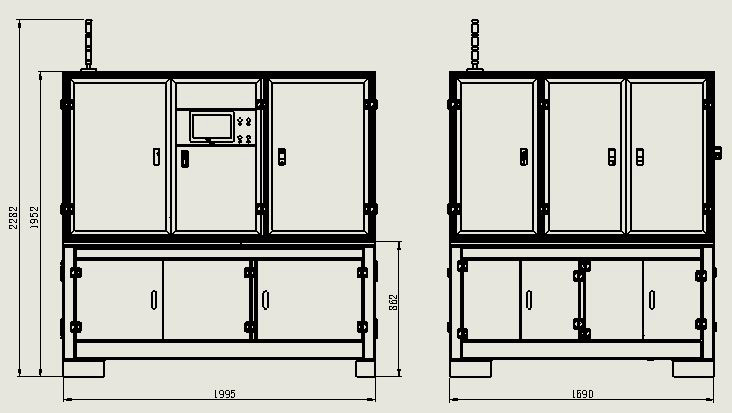
4. พารามิเตอร์ทางเทคนิค

ภาพรวมและแผนผังของเครื่องทั้งหมด
|
รายการ
|
สเปค
|
|
ขนาดเครื่อง
|
1700mm(L) ×2350mm(D) ×1877mm(H) (ขนาดจะขึ้นอยู่กับการออกแบบขั้นสุดท้าย)
|
|
น้ำหนักเครื่อง/ การแบก
|
เกี่ยวกับ1000KG;> 450kg/m2
|
|
แหล่งจ่ายไฟ
|
ac220v±10%; เฟสเดียว;
พลัง: 3kva; ความถี่: 50hz
|
|
อัดอากาศ
|
0.5~0.7mpa(5kgf~7kgf/cm .)2); การบริโภค: 200l/นาที; อากาศแห้ง
|
|
อุณหภูมิ/ ความชื้น
|
5~35℃; 5~55%
|
|
อากาศ/ ฝุ่น
|
ไม่มีก๊าซเกลือ, ก๊าซพิษและกัดกร่อน; ไม่มีฝุ่นนำไฟฟ้า
|
|
สนามแม่เหล็ก และการสั่นสะเทือน
|
จะต้องไม่มีขอบเขตแม่เหล็กที่ส่งผลกระทบต่ออุปกรณ์ จะต้องไม่มีแรงกระแทกและการสั่นสะเทือนที่ชัดเจน
|
|
ไดอะแกรมแบบจำลองทั่วไป
|
|









 th
th en
en fr
fr de
de ru
ru es
es pt
pt ko
ko tr
tr pl
pl





















 รองรับเครือข่าย ipv6
รองรับเครือข่าย ipv6



